So to increase the speed of control I moved from VNC to ssh and this meant I had to add a text based control system. Basically a way to select a motor and then increment or decrement the angle of the motor at varying speeds. Nothin special but still took a far amount of time.
Not much to really show here except possibly the fact that I moved the legs around so that they stuck outwards not inwards but I will demonstrate that once I have some preprogrammed movement for the robot which should
Took awhile for the glue gun to arrive but it did arrive a week ago. So why the 10 day wait?!? Well it hasn't really gone very smoothly.
Three things:
The structure of the robot is not fantastic - the legs should be ever so slightly longer and I should have gone with the harder but better first design
The motor connections are the best so I spent a lot of time trying different methods, in the end I had to glue them so I can't reuse them
It's been quite the uncertain week
So I have completed quite a bit of work on the robot over the last week, I would've submitted an earlier update if it weren't for the fact that I have felt terrible over the last 2-3 days. However, I have been doing robotics work throughout the week, though I didn't yesterday (didn't really do anything yesterday, mainly slept). Anyway, two things have happened: First I have completed the pieces they just need to be attached to motors and we're ready to move some robot, Second I have completed t
So all the pieces of the robot have been cut out. All that remains is for me to drill the holes to connect the pieces to the motors, as well as drill the hole at the top of the chasis to allow the control board to stick out. This sticking out bit is so that connecting the motors to the board is easier. So far so good. Recently I have been doing more work on the project keeping in check with the original lent project idea. The measurements have been fairly accurate though not perfect, but hey it'
Work is being done on the project. I have managed to cut out and smooth off half of the leg pieces and the main chasis pieces. Hopefully get a few more cut tomorrow
Nothing much to say. I have outlined and drawn the pieces that I need to cut out and put together to make the robot physical. The only missing pieces are the connecting pieces which will just be small blocks of wood rather than sheets of wood. The robot is looking to be quite squat but hopefully it should still walk, if not I will just have to recreate the legs.
Well not necessarily regrets, but I am feeling like I am just posting things in here to say I have done something for the day. These are occuring later in the night so it's just chewing into sleeping time. Tomorrow and Wednesday I am unsure whether I'll even get a sketch in. But in light of how my time has been split I have a revision to how I will go about these challenges. I will aim to get a sketch out everyday, like today's it can be a quick 5-10 minute sketch if anything this is helping me
So now that I am back out my house with access to all my motors, the raspberry pi and wood I was able to carry out a couple of measurings onto the wood. I decided to use yesterdays sketches as a rough guide as you where to place the motors but actually using the motors and board to get the correct dimensions. Tomorrow and over the week I probably will only be able to slowly draw out all of the pieces without cutting them, that will probably have to wait untill the weekend.
Tbh I think this
So yesterday I did not manage to complete any work on the robot project in terms of physical. I would like to claim that I had some concepts of it worked out in my head but that's a stretch. I have been done for the weekend with my grandparents so have been doing activities outside of these minor projects. But I have 30 minutes at the end of the day to try and squeeze in at least one of my projects. In yesterdays case I quickly whipped up a sketch, but today I have taken measurements and will ge
So yea, got a bit carried away with my lent side project. Much harder to deal with outlines, sketches and blocked colour in Paint 3D without any layers! Anyway that's beyond the point. I still did manage to get something done on the project...ish.
It's more of a cop out but I got down the basic idea of what the parts will look like, how they will function and the measurements I need to take. will take these measurements tomorrow as the task for that day and then start thinking about dimensi
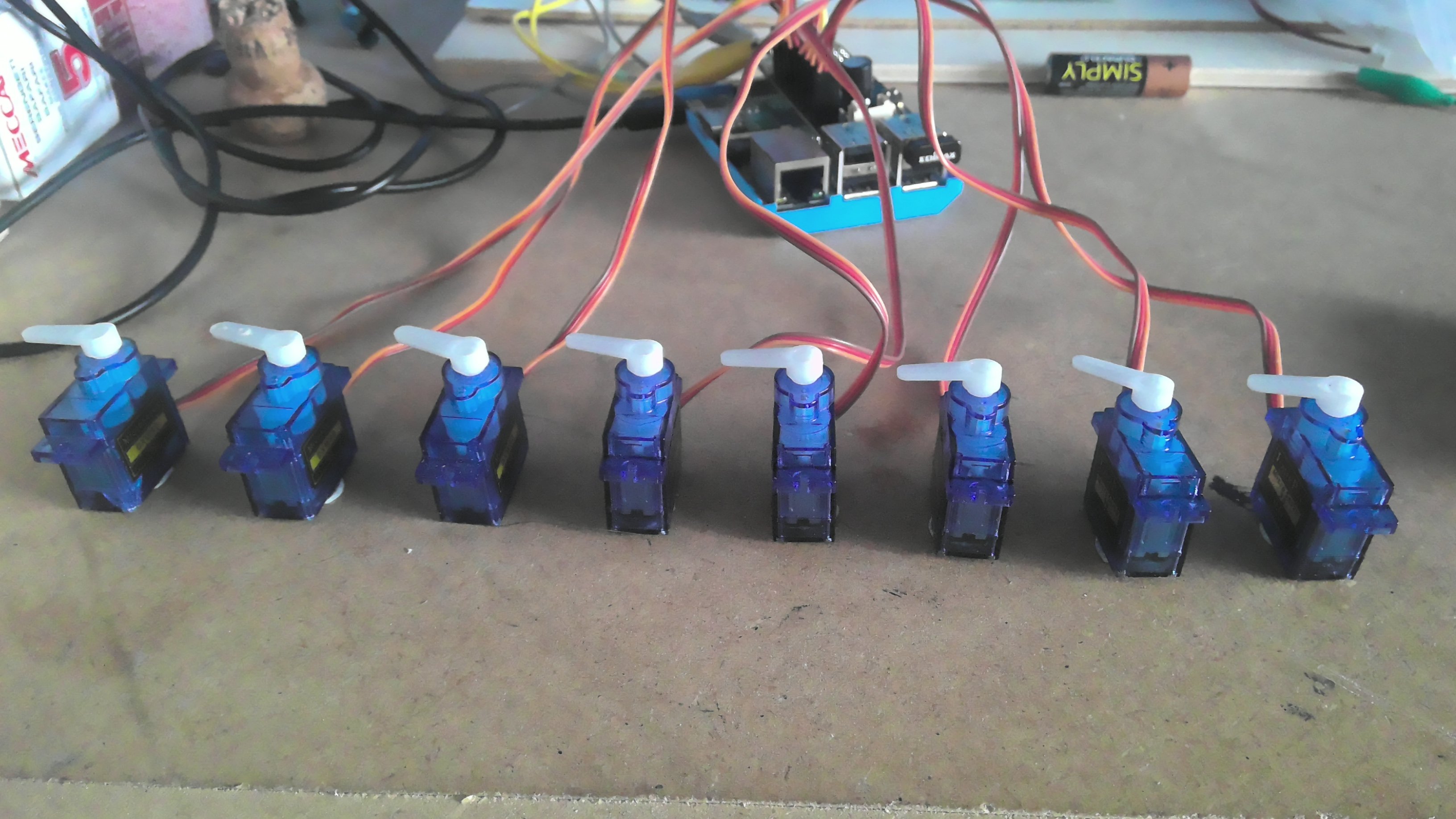
So nothing really exciting today. I just set up the eight motors to my Raspberry Pi, then remotely connected to that through VNC. I also added a quick few lines of code so that I could controll each of the motors individual.
To keep the project rolling from ground up I have already implemented seperate motor classes so that the code is more manageable. The next step really is to get some measurements and actually start getting some legs and a chasis to move around with and manipulate. Not m